
Welcome to my page! I am YUE Wenchao, a passionate about solving technically challenging problems that have a direct impact on the medical robotics community and society. In order to acquire the required skills and technical knowledge required for it, I worked as a Full-time Research Engineer Fellow affiliated with Advanced Robotics Centre (ARC) from National University of Singapore, supervised by Prof. Laschi Cecilia, and I earned M.S. degree with distinction in Mechanical Engineering from National University of Singapore in 2021, supervised by Prof. TAY Eng Hock, Francis. During this period, I joined Medical Mechatronics Lab as a Part-time Research Assistant affiliated with Department of Biomedical Engineering from National University of Singapore, supervised by Prof. Hongliang Ren. While pursuing my Master’s degree, I quickly became aware of the enormous potential that Advanced Robotics techniques and Artificial Intelligence computation hold to improve our medical conditions and then better people’s daily lives. In order to further specialize in these fields, I decided to pursue doctoral studies in Department of Electronic Engineering at The Chinese University of Hong Kong in 2021, where I am currently a third-year Ph.D. Candidate, co-supervised by Prof. Hongliang Ren, Prof. Scott Yuan and Prof. Laschi Cecilia.
My lifelong research revolves around developing wireless soft pop-up machines with a focus on medical applications. By integrating perception and actuation into a single soft module, these machines enable multimodal biopsies in vivo and empower minimally invasive surgical robots to autonomously acquire more biological properties.
Recently, I am working on developing a multimodal surgical robotic tactile interface based on a Collaborative Research Fund (CRF) project and Research Impact Fund (RIF)funded by the Hong Kong Research Grants Council (RGC).
🔥 News
- 12/2023: One poster about the soft pouch motor has won a second-place award at the 8th Chinese Annual Seminar on Soft Robotic Theory and Technology. (Shenzhen, China, 2023)
- 11/2023: One journal paper about soft pouch motors based on liquid-to-gas phase transition is accepted and selected as the front cover.
- 12/2022: One paper about deep reinforcement learning-based robotic palpation strategy is accepted by the 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO). (Xishuangbanna, China, 2022)
- 11/2022: One paper about a laminated continuum robot with gripping force-sensing forceps is accepted by IEEE Sensors Journal.
- 11/2022: Our proposed project on “AI-based Pulmonary Tree-branch Reconstruction for Precise Motion Planning in Personalized Robotic-assisted Bronchoscope Intervention” has been finalisted and won the fourth-place award in AI x HK OpenCup 2022.
- 07/2022: One paper about magnetic origami spring robots is accepted by IEEE Robotics and Automation Letters (RAL) with the option of IEEE International Conference on Intelligent Robots and Systems (IROS) 2022.
- 07/2022: One paper about the origami-inspired structure for multi-DOF force-sensing is accepted by Sensors.
- 05/2022: Our Projects “Magnetic Capsule Robots” and “Modular Parallel Robot” won the Third-place Award and Merit Award in The 8th Hong Kong University Student Innovation and Entrepreneurship Competition. Many thanks for the generous and continuing help from Prof. Ren and Sishen!
- 04/2022: One paper about deployable tubular mechanisms is accepted by Actuators.
- 11/2021: Our Project “Magnetically-Connected Modular-Reconfigurable Mini-Robot Towards Minimally Invasive Procedures” wins Merit Award in Emedic Global 2021.
- 08/2021: Moving from SG to HK for my doctoral study.
- 07/2021: One paper about dual-mode tactile hardness sensors is accepted by Smart Materials and Structures.
- 06/2021: One paper about dynamic piezoelectric tactile sensors is accepted by IEEE Sensors Journal.
📝 Publications [as first/co-first author]
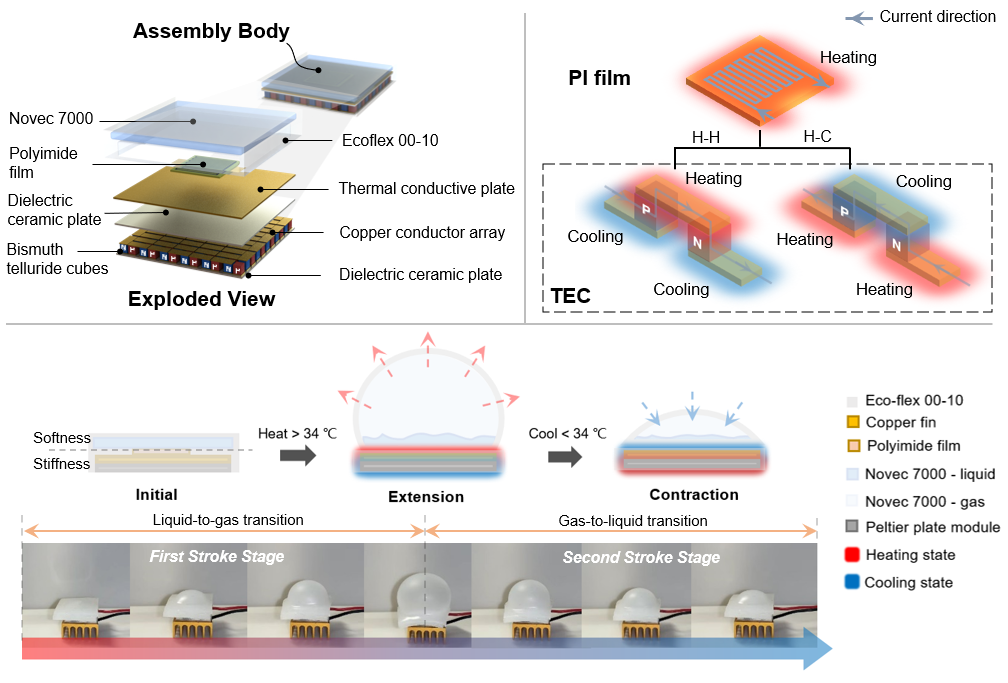
Dual-Stroke Soft Peltier Pouch Motor Based on Pipeless Thermo-Pneumatic Actuation
W. Yue, C. Bai, J. Lai, H. Ren*
- Proposed the novel soft pouch motor based on the pipeless thermo-pneumatic actuation;
- Realized the bidirectional control of liquid-to-gas phase transition;
- Validated several application potentials in both aquatic and terrestrial media environments.
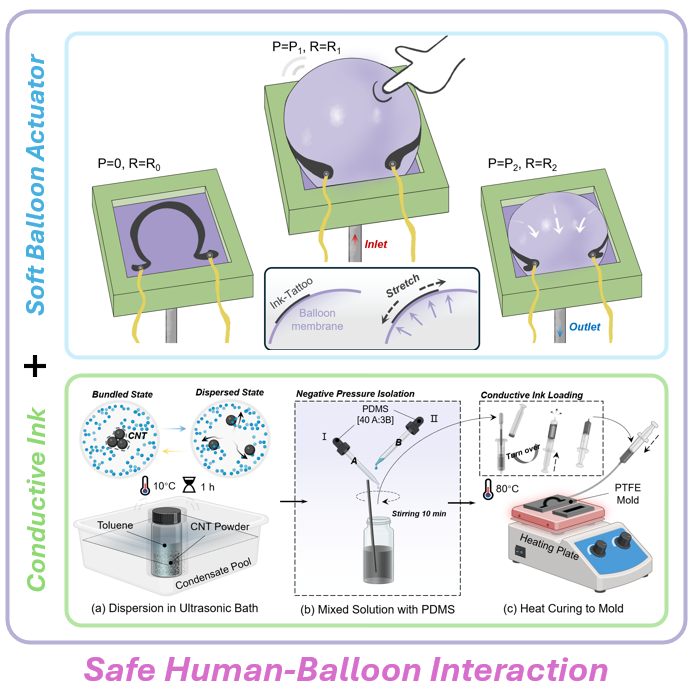
Soft Balloon Actuators Embodied Flexible Ink-Transfer-Printing Sensing for Self-Awareness Inflation and Microneedle Punch
-Embodying sensing capabilities for soft balloon actuators allow for better control and understanding of their deformation behavior.
-Sensing capabilities in soft balloon actuators improve safety in human-machine interactions reducing the risk of over-inflation.
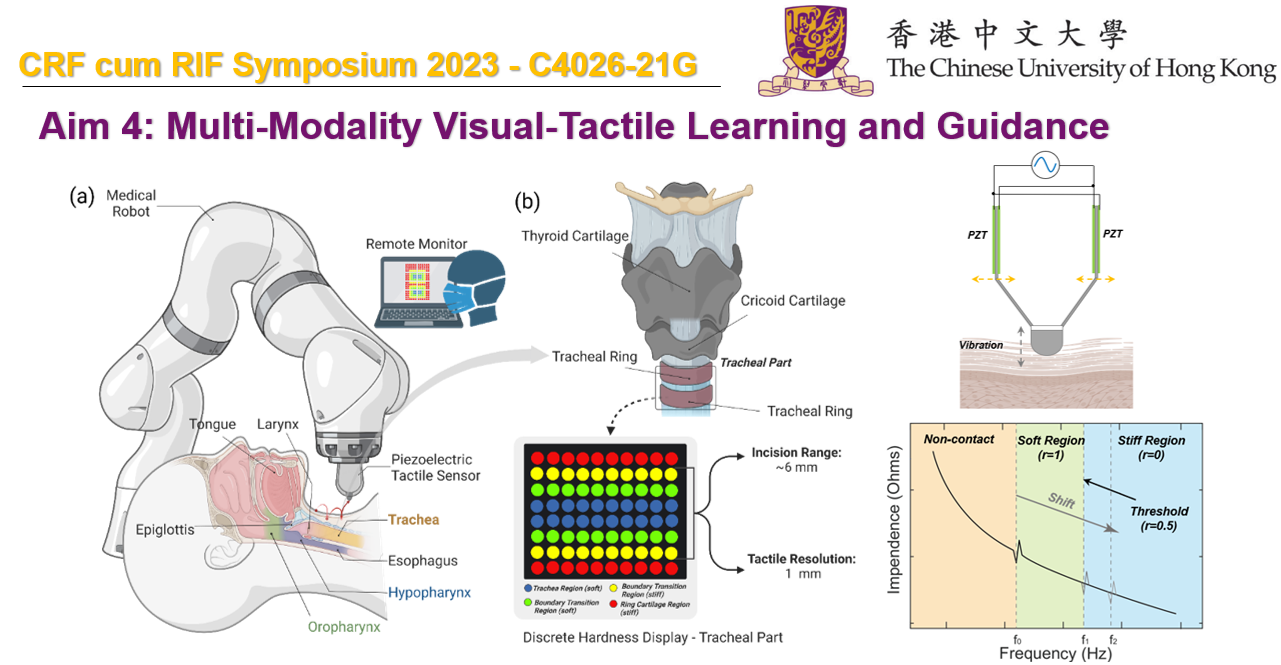
RASEC: Rescaling Acquisition Strategy with Energy Constraints under Fusion Kernel for Active Incision Recommendation in Tracheotomy
Wenchao Yue, Fan Bai, Jianbang Liu, Feng Ju, Max Q-H Meng, Chwee Ming Lim, Hongliang Ren*
- Visualize hands-on information & Localize the trachea regions more efficiently;
- Enable visual-tactile guidance for robotic tracheotomy;
- Promote surgical sub-task autonomy.
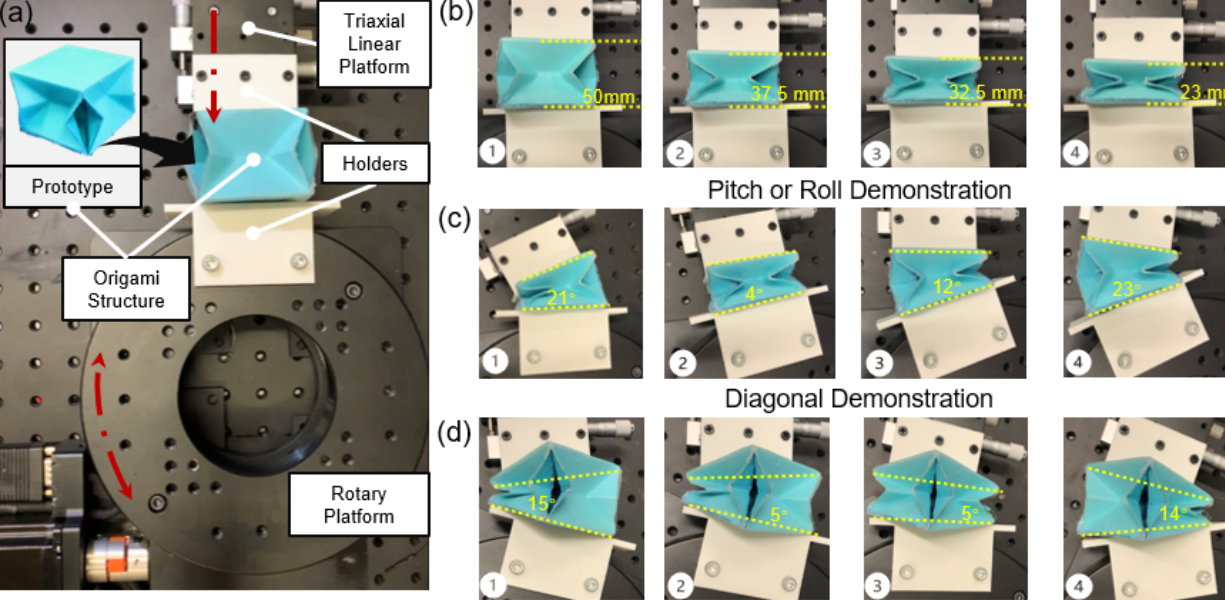
Origami-Inspired Structure with Pneumatic-Induced Variable Stiffness for Multi-DOF Force-Sensing
Yue Wenchao, Qi Jiaming, Song Xiao, Fan Shicheng, Giancarlo Fortino, Chen Chia-Hung, Xu Chenjie, and Ren Hongliang*.
Sensors - Multidisciplinary Digital Publishing Institute (MDPI)
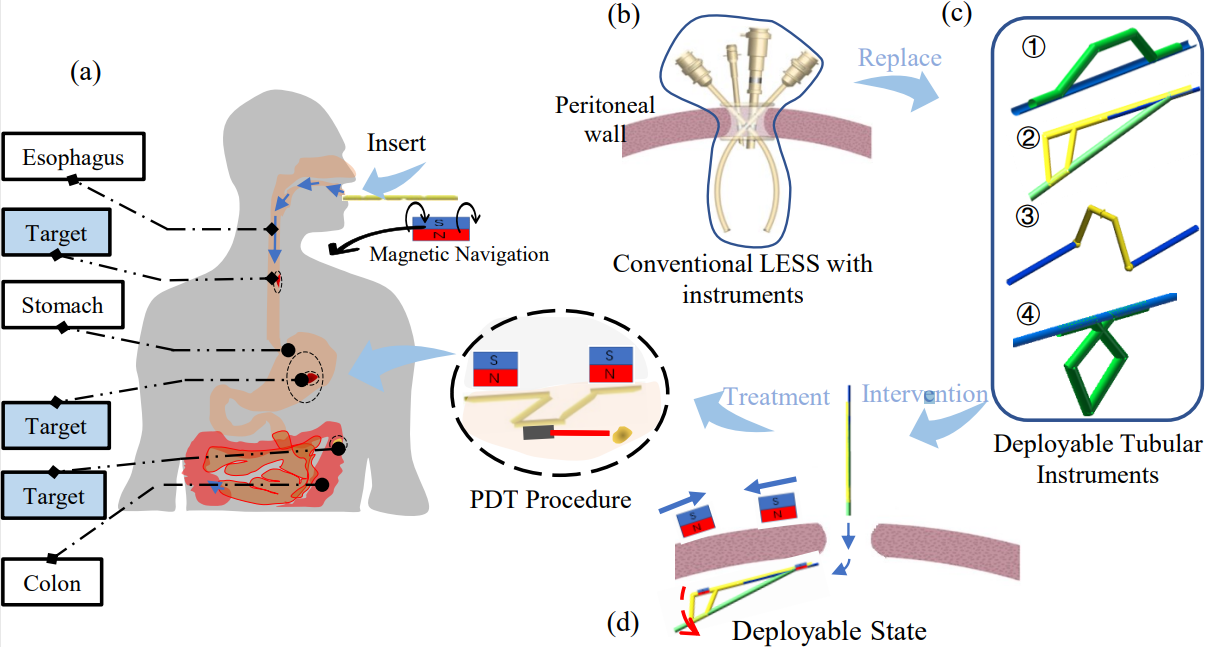
Deployable Tubular Mechanisms Integrated with Magnetic Anchoring and Guidance System
Yue Wenchao, Tang Ruijie, Wong Joei Simin, and Ren Hongliang*.
Actuators - Multidisciplinary Digital Publishing Institute (MDPI)
Yue Wenchao, Ju Feng, Zhang Yingxuan, Yun Yahui, Li Tianliang, Tse Zion Tsz Ho and Ren Hongliang*
IEEE Sensors Journal
💬 Community Contribution
- 28.07.2023, Invited Speaker on behalf of Medical Mechatronics Lab, “Magnetically-connected Modular Reconfigurable Robots”, Roadshow of the CUHK Robotics Open Day hosted by T Stone Robotics Institute, 2023. Link
- 07.01.2023, Invited Speaker on behalf of Medical Mechatronics Lab, Hong Kong Science Popularization Program Series IV - Academician Talks Activities hosted by Centre for Artificial Intelligence and Robotics (CAIR) Hong Kong and The Greater Bay Area Association of Academicians(GBAAA), 2023. Link
- 14.11.2020, Invited Speaker, “Dynamic Piezoelectric Tactile Sensing using Symmetrical Structure of Flexure Hinges and Anisotropic Vibration Modes”, International Conference on Intelligent Equipment and Robots.
👨🔧 Mentoring Experience
- 2023.09 - 2023.12, Teaching Assistant - ENGG 2760C Probability for Engineers
- 2023.01 - 2023.04, Teaching Assistant - ELEG 3103 Robotic Perception and Intelligence
- 2022.09 - 2022.12, Teaching Assistant - ENGG 2760B Probability for Engineers
- 2022.01 - 2022.04, Teaching Assistant - ELEG 3103 Robotic Perception and Intelligence
- 2021.09 - 2021.12, Teaching Assistant - ENGG 2760B Probability for Engineers
© 2021-2022 Wenchao Yue. All Rights Reserved.